WCTRL
Hardware
Firmware
Steuerung eines DC-Motors mit 8-Bit PIC Microcontroller
| Die vorliegende Schaltung ist zur Steuerung von kleinen DC-Bürstenmotoren (< 2 Ampere) im RC-Modellbaubereich konzipiert. Die Stromaufnahme wird durch den Mikrocontroller überwacht und der Motor abgeschaltet, sobald ein vorprogrammierter Stromwert überschritten wird. So kann das Blockieren des Antriebs durch einen mechanischen Endanschlag festgestellt werden, wodurch auf Endschalter verzichtet werden kann. Typische Anwendungen sind z.B. der Antrieb einer Seilwinde oder eines Einziehfahrwerks. |
|
Schaltplan:
|
|
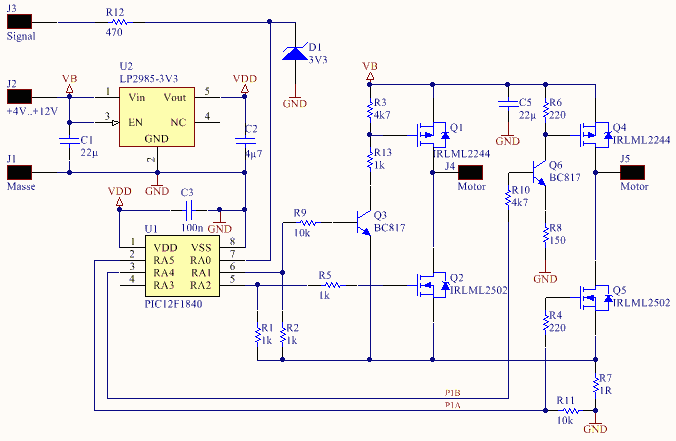
Der Widerstand R7 dient zur Strommessung und muss grob auf die Stärke des Motors angepasst werden. Er sollte so dimensioniert werden, dass bei normalem Betriebsstrom des Motors eine Spannung von etwa 0,2V abfällt.
An die Pads J1/J2/J3 wird in der Regel ein Kabel mit Servostecker zum Anschluss an den RC-Empfänger angelötet. Über den gleichen Anschluss kann ggf. auch der Bootloader zum Ändern der Firmware oder die serielle Schnittstelle der Applikation für Debug- oder Konfigurationszwecke angesprochen werden.
Bei der linken Halbbrücke wird,
je nach Drehrichtung des Motors, entweder Q1 oder Q2
dauerhaft eingeschaltet, während mit der rechten
Halbbrücke (Q4, Q5) über PWM die Motordrehzahl gesteuert
wird. Daher muss auch nur die rechte Halbbrücke für
schnellere Schaltvorgänge ausgelegt sein, wodurch sich die
etwas "unsymmetrische" Dimensionierung der Ansteuerung ergibt. Die
Schaltung ist auf eine PWM-Frequenz bis 125 kHz ausgelegt.