WCTRL
Hardware
Download
Downloads und Einrichtung der Entwicklungsumgebung
| Download: | WCtrl Firmware Projekt (MPLAB X Projektdateien) |
| In Arbeit (vorläufig, unfertig und ungetestet...) |
Die ZIP-Datei enthält zwei Projekte:
- Applikations-Firmware für den Motorcontroller (in C)
- Bootloader, angepasst an das WCtrl-Projekt (ASM-Projekt)
Bitte einen Ordner für das Projekt auf der Festplatte anlegen und den kompletten Inhalt der ZIP-Datei in diesen Ordner entpacken.
Entwicklungsumgebung:
Das Projekt ist für die Verwendung der integrierten Entwicklungsumgebung (IDE) MPLAB X von Microchip vorbereitet. Daher wird vorausgesetzt, dass zur Bearbeitung der Firmware die folgenden Software-Pakete auf dem Computer installiert sind:
- MPLAB X IDE
- C-Compiler XC-8 (die kostenlose Version genügt)
Für die Nutzung des Bootloaders wird ein einfacher USB-zu-Seriell Adapter benötigt, wie er auf der Projektseite zum Bootloader beschrieben ist. Der USB-Adapter wird dafür am Besten mit dem passenden Gegenstück zum Servostecker des Motorcontrollers versehen. Zum Flashen des Controllers kann dessen Spannungsversorgung mit +5V durch den USB-Anschluss erfolgen. Wenn jedoch Testläufe mit Motor während einer Verbindung zum seriellen Port erfolgen sollen, ist dafür eine separate Spannungsversorgung erforderlich. In diesem Fall darf dann nur Masse- und Signalanschluss mit dem USB-Interface verbunden werden.
Über den Software-UART in der Applikationsfirmware können Steuerdaten vom PC an den Controller und Diagnose- oder Debug-Daten vom Controller an den PC gesendet werden. Die Eingabe bzw. Anzeige dieser Daten kann über ein Terminal-Programm, wie z.B. HTerm erfolgen:
- HTerm Terminalprogramm zur Ein/Ausgabe von Steuer- und Diagnosedaten
Bootloader assemblieren und flashen
Wenn der PIC bereits mit dem Bootloader ausgestattet ist, kann dieser Abschnitt übersprungen werden.
Sonst muss zunächst das Bootloader-Projekt assembliert und der Bootloader in den PIC programmiert werden. Dafür ist neben einem geeigneten Programmiergerät (wie z.B. PICKit 3) auch ein Adapterkabel mit SOIC8-Klemme notwendig, um das IC auf der Platine mit dem Programmiergerät verbinden zu können.
Dazu MPLAB X öffnen und mit File/Open Project das Projekt "Bootloader.X" öffnen. Nach einem erfolgreichen Build muss der Code mit dem Programmiergerät in den PIC geflasht werden.
Applikationscode compilieren
Dazu MPLAB X öffnen und mit File/Open Project das
WCtrl-Projekt laden. In der Projektoption "default" sollte
es sich bereits ohne Fehlermeldung compilieren lassen (Production/Clean
and Build Project). In dieser Konfiguration kann nach
evtl. Änderungen im Sourcecode geprüft werden, ob das
Programm fehlerfrei compiliert und die korrekte Funktion ggf.
auch per Debugger überprüft werden.
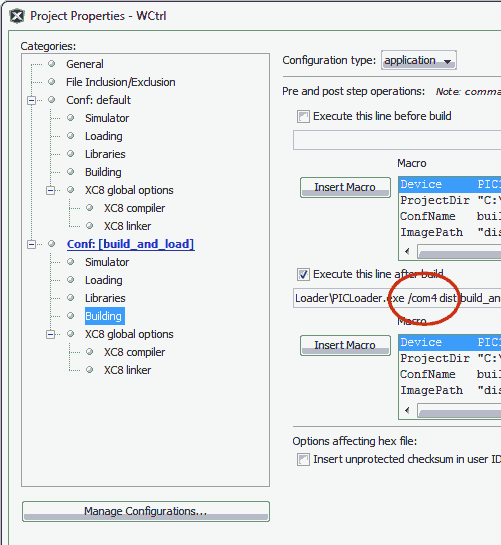
Applikationscode flashen per Bootloader:
File/Project Properties, dann bei "Categories" für "Conf: [build_and_load]" in der Kommandozeile bei "Execute this line after build" den richtigen COM-Port eintragen: